近日,6163银河手机版在国际知名期刊《Journal of Franklin Institute》(JCR1区,影响因子IF = 4.246)发表题为《Safety control using barrier certificates for multiagent systems with input saturation and formation constraints》研究论文。
本文针对有界建模误差、执行器输出饱和以及安全性能组合约束下的非线性多智能体系统的编队控制问题,提出一种鲁棒安全编队控制方法,该方法首先通过构建一种新的可伸缩控制机制,将智能体的安全运行区间变换为沿着智能体运动过程中的每个坐标对应的约束避障函数,同时,利用可调节的实际控制输入上下界构建比依赖运行边界的非对称闭环饱和控制机制;再次,构建基于Super-twisting control (STC)技术的控制机制,抑制外部扰动和不确定性对多智能体系统影响。通过严格的数学分析证明通过微小调节,可实现分布式安全控制和鲁棒控制无缝对接,有效解决上述组合约束下的多智能体系统安全编队控制问题。最后,利用数字仿真结果验证所提算法的可行性。

图1智能体轨迹变化行为
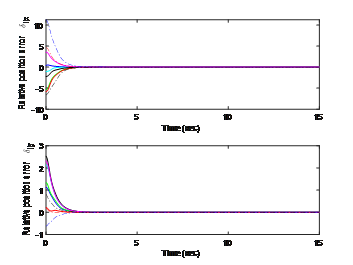
图2智能体在x和y轴上的相对位置误差
Xiaowu Yang*, Xiaoping Fan, Fei Long, Ganrong Li. Safety control using barrier certificates for multiagent systems with input saturation and formation constraints[J]. Journal of the Franklin Institute, 359(2022)5433-5457